卷三 10|为什么执行层不只接本地工具:SkillTool / AgentTool 的位置¶
导读¶
- 所属卷:卷三:工具系统怎么把模型意图落成执行
- 卷内位置:10 / 11
- 上一篇:卷三 09|ToolSearchTool 怎么在能力面里找该用什么工具
- 下一篇:卷三 11|把整条执行层重新压成一张稳定运行图
这篇要回答的问题¶
卷三前九篇已经把本地对象大体铺开了:
- Bash 负责命令执行
- File 家族负责材料输入与现实变更
- Search 家族负责证据定位与能力发现
如果到这里收卷,读者很容易形成一个错误地图:
好像执行层只是一层本地工具总线。
第 10 篇的作用,不是替卷五做防误解说明,而是把卷三这张地图补全。
因为 Claude Code 的执行层真正统一的,从来不是“本地能力”,而是:
凡是能被 runtime 正式接住、并继续推进工作的执行对象。
顺着这个定义,SkillTool / AgentTool 留在卷三就不是越界,而是补地图。
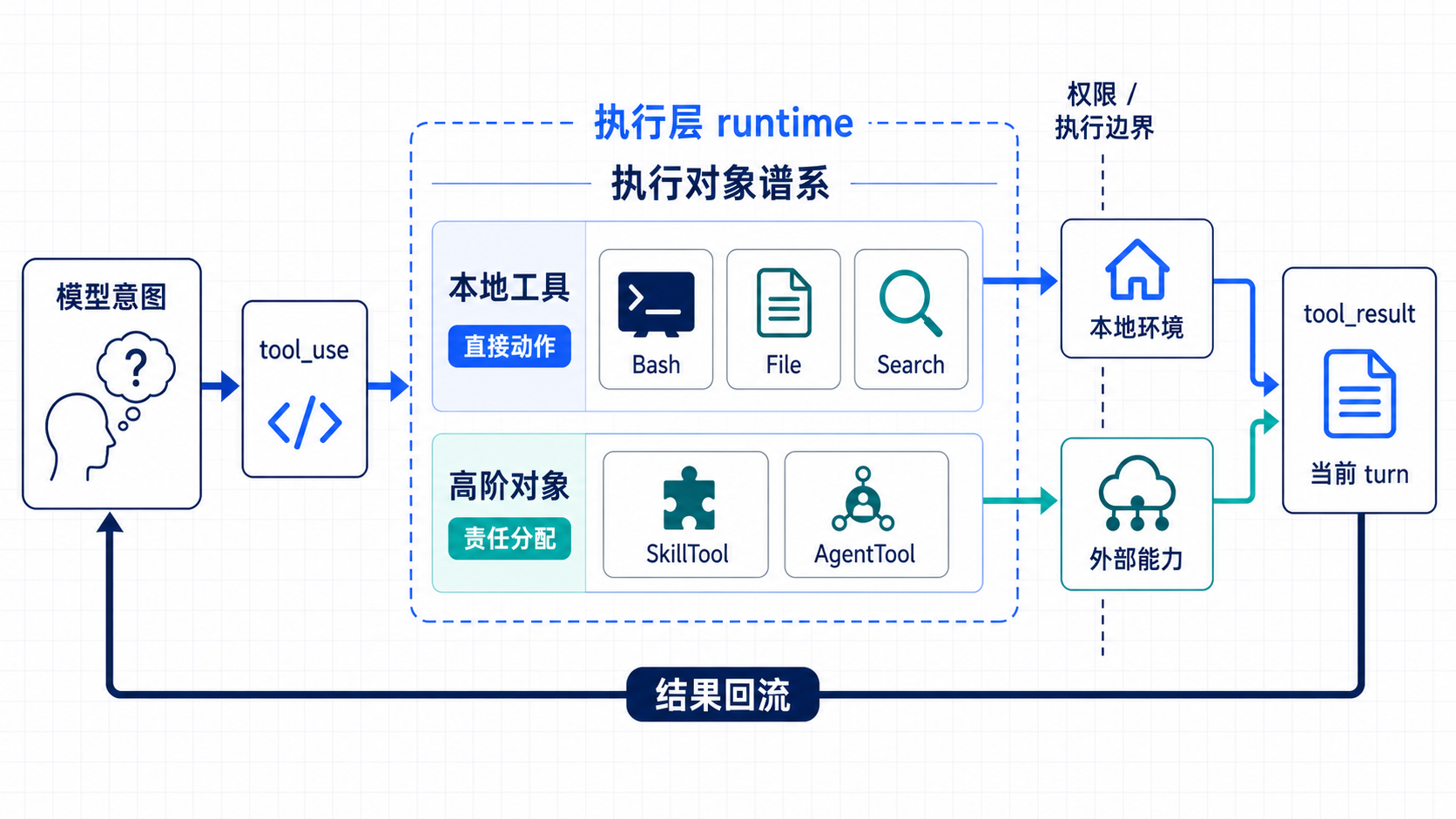
图:执行层不只连接本地工具,也会把 SkillTool、AgentTool 与外部能力放进同一套执行边界中处理。
先给结论¶
结论一:卷三统一的不是本地工具,而是执行对象谱系¶
这是第 10 篇最该留下来的句子。
卷三前半已经立过两层判断:
- Tool 统一的是对象形态
- orchestration 统一的是接入与分发
顺着这两层往下看,执行层真正稳定下来的,就不是一组本地实现,而是一张对象谱系:
- 有的对象直接执行命令
- 有的对象读取或改写现实材料
- 有的对象负责找证据
- 有的对象负责找能力
- 有的对象把工作转交给更高阶执行者
SkillTool / AgentTool 的加入,补全的正是这张谱系图。
结论二:SkillTool / AgentTool 仍然属于卷三,因为它们仍走执行链¶
判断它们该不该留在卷三,不该看它们“高级不高级”,而该看它们是不是还在同一条链上:
- 是否由
tool_use发起 - 是否由 runtime 正式接住
- 是否会把结果重新送回当前 turn
只要这三点成立,它们就仍然属于卷三正在讨论的执行层对象。
结论三:它们把执行层从“直接动作层”扩成了“执行责任分配层”¶
前面的大多数对象,都在直接碰现实:
- 跑命令
- 读文件
- 改文件
- 找证据
而 SkillTool / AgentTool 更特殊的地方在于:它们经常不是自己把动作做完,而是把当前问题转交给:
- 一套方法链
- 一个持续工作的 agent 单元
这说明执行层不只是做动作,还会分配执行责任。
为什么 SkillTool / AgentTool 仍属于执行层¶
第一,因为它们仍然是正式调用对象,不是额外漂浮的一层能力描述¶
从卷三视角看,关键不在于 skill 或 agent 背后有多少扩展机制,而在于它们一旦作为 Tool 出现,就已经进入了执行层语言:
- assistant 可以调用它
- orchestration 可以识别它
- 当前 turn 可以等待它的结果回流
这说明它们并不是卷三之外突然插进来的陌生物,而是执行对象谱系中的高阶成员。
第二,因为它们仍然在回答同一个卷级问题¶
卷三从头到尾只回答一件事:
模型决定做事之后,runtime 怎样把这份意图继续推进成现实工作?
对 BashTool 来说,推进方式是直接跑命令。 对 FileReadTool 来说,推进方式是把材料拉进当前判断。 对 SkillTool / AgentTool 来说,推进方式则是把工作继续委托给更高阶执行者。
推进方式不同,但回答的仍是同一个卷级问题。
第三,因为不补这一层,卷三的地图会少掉一类关键对象¶
如果卷三只写到本地工具,读者就会误以为:
- 只有直接碰文件、命令、搜索的对象才算执行对象
- skills / agents 是下一卷才突然出现的新系统
这会让卷五显得像另起炉灶。
而事实更接近于:卷三先交代它们也走执行层,卷五再展开它们怎样长成平台能力。
图 1:执行对象谱系图¶
flowchart TD
A[tool runtime] --> B1[本地执行对象]
A --> B2[高阶执行对象]
B1 --> C[Bash / File / Search]
B2 --> D[SkillTool / AgentTool]
C --> E[直接碰现实材料或系统对象]
D --> F[转交方法链或子任务执行]
E --> G[tool_result 回流]
F --> G这张图的重点不是“本地 / 非本地”的分类,而是:它们都已经属于同一张执行对象谱系图。
补图:直接动作对象与高阶执行对象¶
flowchart TD
A[执行对象谱系] --> B[直接动作对象]
A --> C[高阶执行对象]
B --> B1[Bash / File / Search]
B1 --> B2[直接碰现实材料或系统对象]
C --> C1[SkillTool / AgentTool]
C1 --> C2[转交方法链或工作单元]
B2 --> D[tool_result 回流当前 turn]
C2 --> D这张补图把卷三第 10 篇最重要的升级压得更直接:执行层统一的不是本地工具,而是凡是能被 runtime 正式接住并继续推进工作的执行对象。 只是其中有些直接碰现实,有些负责转交执行责任。
SkillTool / AgentTool 在卷三里到底讲到哪里¶
卷三只需要把地图补齐到这个程度:
- 它们为什么也算执行对象
- 它们怎样沿执行链被接住
- 它们和直接动作类对象的差异是什么
也就是说,这里要讲的是位置,不是展开。
因为卷三在讲执行层地图,卷五才讲扩展平台结构。
图 2:SkillTool / AgentTool 在执行层中的位置图¶
flowchart TD
A[assistant 形成更高阶 tool_use] --> B[orchestration 匹配 SkillTool / AgentTool]
B --> C[转交给 skill 方法链或 agent 工作单元]
C --> D[执行结果 / 阶段结果返回]
D --> E[回到当前 turn]这篇不展开什么¶
1. 不展开 skill 的发现、frontmatter 和方法学系统¶
这些会在后面讨论扩展能力时再展开。
2. 不展开 agent / subagent 的完整运行结构¶
这里只说明它们为什么属于执行对象谱系,不提前进入平台层正文。
3. 不把这篇写成“这里只提一下,后面再说”的说明文¶
这篇本身要完成的任务很明确:把卷三执行层的对象范围补齐。
和前后文的边界¶
它承接第 09 篇¶
第 09 篇已经说明执行层不仅会找现实证据,也会找能力路线。第 10 篇进一步说明:被发现、被调用的执行对象,也不只限于本地工具。
它导向第 11 篇¶
只有把 SkillTool / AgentTool 也放回执行层地图,卷尾那张稳定运行图才不会少掉一个对象层级。
一句话收口¶
第 10 篇真正补上的,不是“顺便提一下非本地工具”,而是卷三缺失的对象谱系:执行层统一的从来不是本地能力,而是凡是能被 runtime 正式接住并继续推进工作的执行对象;SkillTool / AgentTool 只是这张谱系图里的高阶成员。