卷七 06|command、tool、skill、agent 的边界为什么最终要在卷七收口¶
导读¶
- 所属卷:卷七:命令、工作流与产品层整合
- 卷内位置:06 / 08
- 上一篇:卷七 05|工作流控制层是怎样在 Claude Code 里成立的
- 下一篇:卷七 07|为什么 Claude Code 的产品形态本质上是 runtime 被包装给用户的方式
第 05 篇已经把 workflow control layer 立住了。
第 06 篇接着要解决的,是卷七的边界总收口:
为什么 command、tool、skill、agent 的边界,必须站在控制层视角,最终在卷七统一收口?
这篇只负责从控制层视角重排四者职责,不提前展开产品形态正文。
这篇要回答的问题¶
到卷七这里,如果还沿用前面几卷各自的局部视角去看 Claude Code,很容易得到四句都对、但拼不成系统的话:
- command 是用户入口;
- tool 是执行动作;
- skill 是方法组织;
- agent 是执行者结构。
这四句话本身没错。
问题在于,卷七第 05 篇已经把另一件事立起来了:Claude Code 不只是在堆入口、对象和执行者,它还长出了一层 workflow control layer。
一旦这层成立,再看前面四个对象,就不能只按各自卷里的局部职责来理解了。读者接下来会自然追问:
- command 既然是入口,它和 skill 的关系到底在哪里切?
- tool 看起来也是 command 能调的东西,它和 command 又怎么切?
- skill 会调 tool,也会触发 agent,它到底站在哪层?
- agent 既然名字里常常也带 tool,为什么它又不是 tool?
所以本篇真正要回答的是:
为什么 command、tool、skill、agent 的边界,必须站在控制层视角,最终在卷七统一收口?
这篇不展开什么¶
按卷七卡片,这篇只做边界总收口,不提前写 07 / 08 的产品形态正文。
因此本篇不展开:
- Claude Code 今天的产品外形为什么会长成这样;
- runtime 被包装给用户的方式;
- 卷七总收束的产品判断。
本篇只做一件事:把 command、tool、skill、agent 从控制层视角重新分层。
旧文与源码锚点¶
旧文素材锚点¶
docs/guidebookv2/volume-5/08-boundaries-between-skill-tool-and-agent.mddocs/guidebookv2/volume-5/18-boundaries-and-coordination-between-agent-skill-and-tool.mddocs/guidebook/volume-1/20-processpromptslashcommand.md
补充素材锚点¶
docs/guidebook/volume-1/31-prompt-as-instruction-layer.mddocs/guidebookv2/volume-3/10-why-execution-layer-does-not-only-handle-local-tools.mddocs/guidebookv2/volume-5/12-why-agent-is-not-just-another-tool.mddocs/guidebookv2/volume-5/14-why-runagent-feels-like-an-agent-runtime-assembly-line.md
源码锚点¶
cc/src/commands/cc/src/tools/cc/src/skills/cc/src/tools/AgentTool/
说明:当前仓库不直接携带
cc/src/*源树,本篇沿用卷一、卷三、卷五旧稿中已核对过的源码链与函数职责,作为证据抓手。
主证据链¶
卷三、卷五、卷六分别把动作对象、方法对象和执行者对象立起来了 → 但到了卷七,系统又已经明确长出了用户入口与 workflow control layer → 于是 command、tool、skill、agent 就不能继续只按“对象长相”来分,而必须按控制层里的职责重切:谁负责把意图送进来,谁负责把动作落下去,谁负责把动作组织成可复用方法,谁负责承担整段工作并继续分叉 → 因而这四者的边界必须在卷七统一收口。
主图:command / tool / skill / agent 边界总图¶
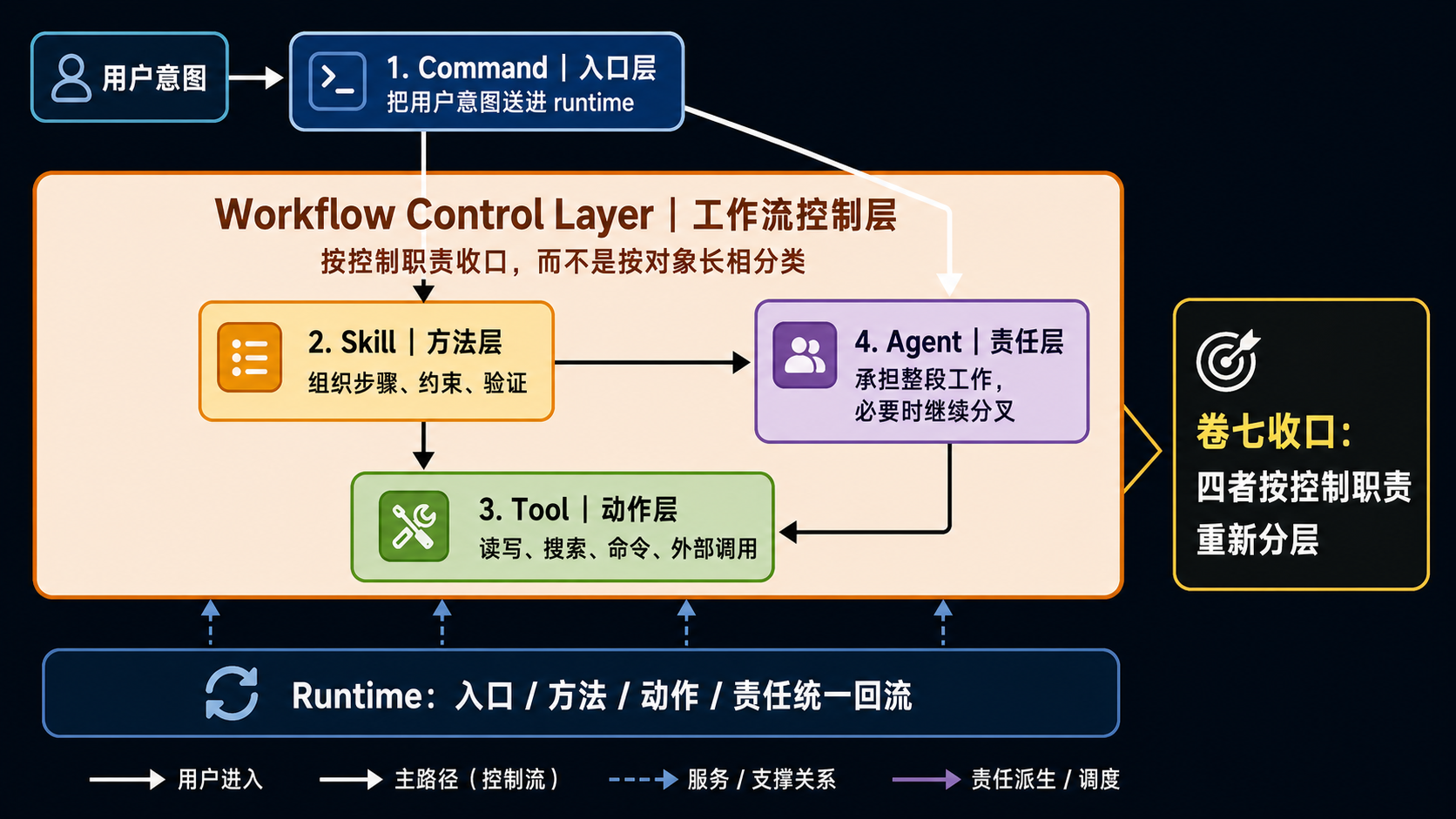
图:这张图把四类边界重新排齐:command 管入口,tool 管动作,skill 管可复用知识与流程,agent 管执行者,卷七负责说明它们如何在控制层闭合。
这张图最想保住的不是箭头多少,而是四层职责:
command 管入口,tool 管动作,skill 管方法,agent 管执行责任。
补图:四对象判别决策树¶
flowchart TD
A[你现在真正缺的是什么] --> B{缺口性质}
B -->|缺正式用户入口| C[Command]
B -->|缺现实动作执行| D[Tool]
B -->|缺稳定方法组织| E[Skill]
B -->|缺整段工作承担者| F[Agent]
C --> G[runtime]
D --> G
E --> G
F --> G这张补图把卷七这篇最该留下来的东西压成了一把裁决尺子:command 管入口,tool 管动作,skill 管方法,agent 管执行责任。
先给结论¶
结论一:卷五能把 tool / skill / agent 三者切开,但只有卷七能把 command 一起纳入同一张控制图¶
卷五第 08、18 篇已经把三者边界切得很清楚:
- tool 负责动作执行;
- skill 负责方法组织;
- agent 负责执行者结构。
但那时还缺一个东西:用户入口层。
没有 command 这一层时,读者看到的是对象谱系:
- runtime 里有哪些动作对象;
- 有哪些方法对象;
- 有哪些执行者对象。
一旦卷七前半段把 command 和 runtime interface 立起来,问题就变了。
因为系统不再只是“有哪些对象”,而是要回答:
- 用户的意图到底先从哪里进入;
- 进入后怎样被组织成方法;
- 再怎样落成动作;
- 最后又由谁承担整段工作。
所以 command 必须加入总图,而四者边界也只能在卷七一起收口。
结论二:这四者的边界,不该按“是不是能做事”切,而该按“在控制链里负责哪种职责”切¶
这是本篇最重要的判断。
如果只按“是不是能做事”来切,这四者会越看越糊:
- command 当然也能触发事情;
- tool 更直接能做事;
- skill 会组织一整段做事流程;
- agent 甚至能独立完成一整段工作。
于是它们看起来都像“某种能力单元”。
但一旦站到控制层视角,边界就会清楚很多:
- command 解决的是:用户怎样把意图送进 runtime;
- tool 解决的是:runtime 现在能直接落什么动作;
- skill 解决的是:这些动作该怎么被编排成稳定方法;
- agent 解决的是:这段工作由谁承担,是否继续分叉,结果怎样回流。
这不是按“都能做什么”切,而是按“分别控制哪种职责”切。
结论三:卷七之所以必须收口,是因为 control layer 已经让四者开始互相贴边¶
在前面几卷里,四者还能各自占一个相对清楚的局部角度:
- 卷三偏动作;
- 卷五偏方法和扩展对象;
- 卷六偏执行者与协作。
但卷七一旦把 command 和 control layer 放进来,四者之间就开始天然贴边:
- command 往下会直接接到 skill 或 agent;
- skill 往下会调 tool,往上也可能触发 agent;
- agent 本身会带着工具池工作;
- command 里的一些控制命令,本身又在重新安排 skill / agent / tool 的使用方式。
如果这时不统一收口,读者就会只看到大量交叉,而看不见新的分层原则。
第一部分:为什么卷五的边界,到卷七必须重切一次¶
1. 卷五切的是对象边界,卷七切的是控制职责边界¶
卷五第 08 篇的判断非常稳:
tool 是动作执行层,skill 是方法组织层,agent 是执行者结构层。
第 18 篇又从执行者侧重切了一遍:
- tool 负责把动作做下去;
- skill 负责把动作组织成方法;
- agent 负责把一段工作交给谁承担。
这些判断都成立。
但它们仍主要站在“对象是什么”来切。
卷七不一样。卷七要回答的是:
- 控制层怎样成立;
- 用户入口怎样接进来;
- workflow 怎样被正式控制。
一旦问题变成这样,原来的对象边界就需要继续被压进控制职责边界。
2. 旧边界不够,不是因为旧边界错了,而是因为少了 command 这一层¶
前面之所以还能只切 tool / skill / agent,是因为那时还没有把 command 当成正式用户入口来单独立住。
但卷七前 02、03、04 篇之后,读者已经知道:
- command 不是快捷方式;
- command 会继续接进 runtime;
- frontmatter / interface 也会进入运行语义。
这时如果还不把 command 放进总图,整套系统就会少掉“用户怎样进来”的那一层。
少了这一层,边界图还是不完整。
第二部分:从控制层视角看,四者各自到底负责什么¶
1. command:负责把用户意图送进控制链¶
卷一第 20 篇已经说明,processPromptSlashCommand(...) 并不是简单的 prompt 拼接器,而是 inline 路径的展开层:
- 找 command;
- 读取
getPromptForCommand(...); - 注册 hooks;
- 记录 invoked skill;
- 生成结构化 messages;
- 把权限、模型等运行元数据一起带出去。
这说明 command 的核心不是“替别人做动作”,而是:
把用户当前想做的事,翻译成 runtime 当前能接住的一次正式进入。
所以 command 的边界应该切在入口层,而不是执行层。
2. tool:负责把动作真正落到世界上¶
卷三已经讲得很清楚:tool 的完成单位通常是一次动作。
它关心的是:
- 输入是什么;
- 执行什么;
- 返回什么结果。
不管是 Bash、Read、Edit,还是更高阶的工具对象,只要它主要回答的是“现在能落下什么动作”,它就站在动作执行层。
所以 tool 的边界应该切在动作层,而不是方法层或责任层。
3. skill:负责把动作组织成稳定工作方法¶
卷五第 08 篇最值的一点,是把 skill 定义成中间层:
- skill 会向下碰到 tool;
- skill 也可能向上碰到 agent;
- 但它自己始终不是动作原语,也不是执行者本体。
再结合卷七第 04、05 篇,现在可以把它说得更准一点:
skill 是控制层里的方法模块。
它真正控制的是:
- 这类任务按什么步骤做;
- 哪些约束先立;
- 什么时候该查,什么时候该改,什么时候该验证;
- 必要时是否应该 fork 给 agent。
所以 skill 的边界应该切在方法组织层。
4. agent:负责承担整段工作并维持执行责任¶
卷一第 31 篇和卷五 agent 组都已经说明,AgentTool 与 runAgent.ts 真正在装配的是:
- 上下文;
- 工具池;
- hooks;
- MCP;
- transcript;
- 分叉 worker 与结果回流。
这说明 agent 的重点从来都不是某个单一动作,也不是一套方法说明,而是:
谁来承担这段工作。
更重要的是,到了卷七这里,这个判断还要再往前走一步:
- agent 不只承担工作;
- 它还承担执行责任边界;
- 也就是“谁负责继续推进这段工作回路”。
所以 agent 的边界应该切在执行责任层。
第三部分:四者最容易混淆的地方,为什么要在卷七一次讲清¶
1. 为什么 command 不是 tool¶
因为 command 解决的是入口,不是动作。
它当然可能触发某个动作,但那只是后续结果;它自己的职责是:
- 把用户意图送进系统;
- 决定这次进入走哪条命令/skill/agent 路径;
- 把展开后的内容与运行元数据注入当前主链。
也就是说,command 的结果可能是“接下来去做事”,但 command 自己不是那件事。
2. 为什么 skill 不是 tool¶
卷五已经说过,tool 直接执行,skill 组织执行。
到了卷七,这句话还可以再补一刀:
- tool 控制的是局部动作;
- skill 控制的是动作之间的关系与顺序。
skill 可以看起来“做了很多事”,但那是因为它在编排;不是因为它自己成了动作原语。
3. 为什么 skill 也不是 agent¶
这一点在卷五第 08 篇就已经非常关键:fork skill 的执行主体最终仍然是 agent runtime。
也就是说:
- skill 可以把工作包组织出来;
- 甚至可以指定
context: fork、指定 agent; - 但真正拿着上下文、工具池和生命周期去承担工作的,仍然是 agent。
到了卷七,这个判断要被重新写成:
- skill 负责方法控制;
- agent 负责执行责任。
这样边界会比“一个偏轻一个偏重”清楚得多。
4. 为什么 agent 也不是“高级 tool”¶
卷五第 12、14 篇反复强调过:AgentTool 名字里虽然有 tool,但它触发的不是某个局部动作,而是一个执行体。
它会:
- 选择执行者;
- 装配工具池与上下文;
- 决定是否继续分叉;
- 回收结果。
这说明 agent 的主语不是动作,而是责任承担者。
所以 agent 虽然通过一个 tool 入口暴露出来,但它不应被误切回 tool 层。
第四部分:为什么说“在卷七收口”比“在卷五收口”更稳¶
因为卷七终于具备了四个同时成立的视角:
- 用户入口视角:command 不是快捷方式,而是正式入口;
- 运行时接口视角:frontmatter / interface 会进入运行语义;
- 工作流控制视角:plan / debug / verify / orchestration 已经收成 control layer;
- 对象与执行者视角:tool / skill / agent 各自已有旧卷基础。
只有四个视角一起到位,command、tool、skill、agent 的边界图才真正完整。
换句话说,卷五能切清其中三者,卷七才能把四者放回同一张控制层总图里。
第五部分:这篇怎样为 07 / 08 留坡度¶
到这里,卷七中段已经做完两件最关键的事:
- 第 05 篇立住 workflow control layer;
- 第 06 篇把 command / tool / skill / agent 压回控制层边界图。
那接下来进入 07 / 08 时,问题就不再是:
- command 是什么;
- tool 是什么;
- skill 是什么;
- agent 是什么。
而会变成更上层的一问:
当用户入口、方法组织、动作执行和执行责任这些层都已经被 runtime 收好时,Claude Code 为什么最终会以今天这种产品形态暴露给用户?
也就是说,第 06 篇完成的不是名词解释,而是为产品形态判断清场。
最后收一下¶
为什么 command、tool、skill、agent 的边界必须在卷七收口?
因为到了卷七,Claude Code 已经不只是几个对象并列存在,而是同时拥有:
- 正式用户入口;
- 运行时接口;
- workflow control layer;
- 执行动作、方法模块与执行者结构。
这时如果还按旧卷里的局部角度分别理解它们,读者只会看到交叉,不会看到系统。
只有站到控制层视角,边界才会重新变清楚:
- command 负责把意图送进 runtime;
- tool 负责把动作真正落下去;
- skill 负责把动作组织成可复用方法;
- agent 负责承担整段工作并维持执行责任。
所以本篇最稳的结论是:
command、tool、skill、agent 的边界之所以要在卷七收口,不是因为前面的边界判断失效了,而是因为当控制层成立后,这四者终于可以不再按对象长相被理解,而能按“入口、动作、方法、责任”这四种控制职责被重新分层;只有这样,Claude Code 才会从一组看似互相重叠的对象,重新显成一个有入口、有执行、有方法、有责任分层的完整系统。